top of page
Product Specification
Dual-Arm Mobile Manipulator RB-Y1
Web Manual
Github
RB-Y1 Software
Based on RB-Y1's excellent performance and safety, RB-Y1 has a flexible and scalable structure that allows the system to be quickly and easily configured to meet various customer needs.
The RB-Y1 software architecture is structured as follows:
-
Robot PC: Real-time control PC to ensure stable performance and safety functions.
-
User PC: A PC that can build a development environment to suit various customer needs and run applications.
-
Non-real-time communication channel: Can transmit abstracted higher-level control commands (MoveJ, MoveL, etc.) that do not require real-time or perform various system settings.
-
Real-time communication channel: Can transmit low-level control commands (motor position tracking, motor current control, etc.) that require short cycle time and real-time and receive the robot's status.
-
Robot model library: You can obtain robot kinematics and dynamics information necessary for building a simulation environment.
-
Dynamics and motion library: Provides various libraries necessary for higher-level control development.





MuJoCo Simulator
Isaac Sim
Simulation
Providing models (URDF/MJCF) for building simulation environment

- System Configuration Examples -
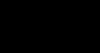
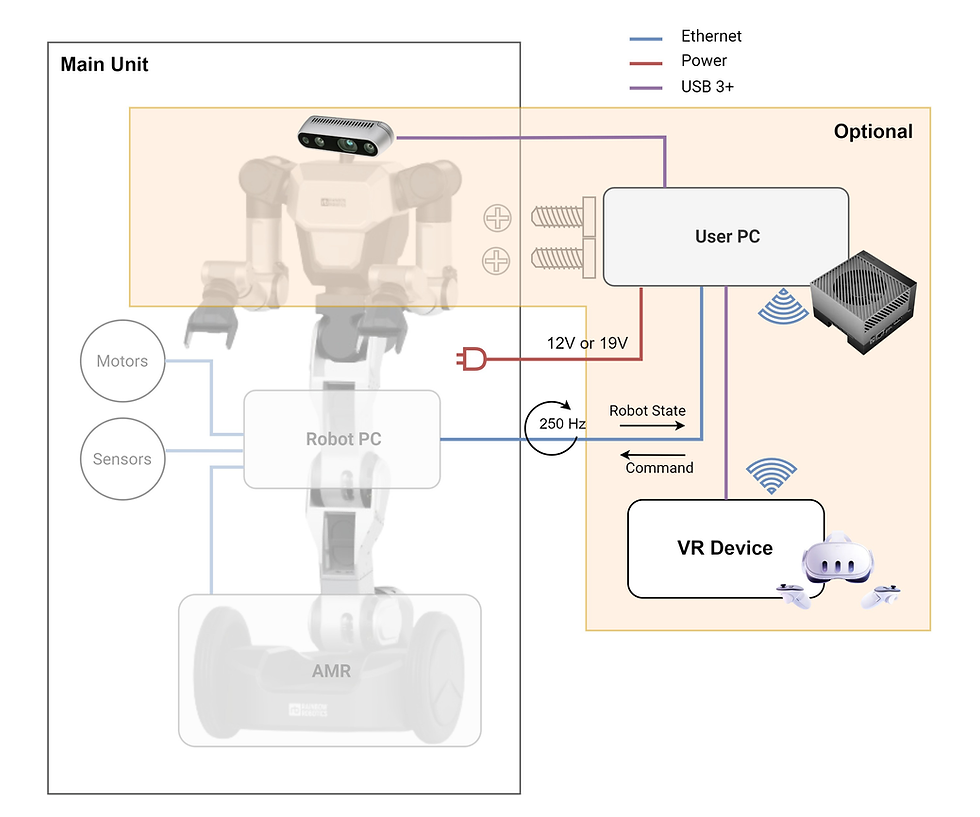
Data Collection via Teaching Device (Teaching Device or VR Device)
Building a data collection system necessary for conducting machine learning research, including Learning from Demontration (LfD)
-
Teaching device
- Teaching device (available as an accessory)
- VR device (third party)
-
Sample code for bi-(uni-) directional teleoperation
Address
Official email
Product inquiry
Technical support
Tel
Fax
Homepage
SNS
3550 Salt Creek Lane, Suite-110, Arlington Heights IL 60005
rainbow@rainbow-robotics.com
rby@rainbow-robotics.com
rby.support@rainbow-robotics.com
+1-586-246-1442
+1-224-248-9961
www.rainbow-robotics.com
COPYRIGHTⓒ2024. RAINBOW ROBOTICS ALL RIGHTS RESERVED.
bottom of page